Application Of Learning Theories In Pediatric Dentistry
Learning Theories Introduction
There is an active and continuous interaction between a child and the environment. The ‘environment entity’ is composed of the individuals encountered by the child, their behavioural representation, circumstances met, challenges encountered, and rewards or punishments imposed on the child for a particular action.
Table of Contents
Learning theorists advocate that the evolution of the mental makeup of the child is unanimously dependent on the environmental entity. The environment influences the development of the behaviour of a child significantly.
Read And Learn More: Paediatric Dentistry Notes
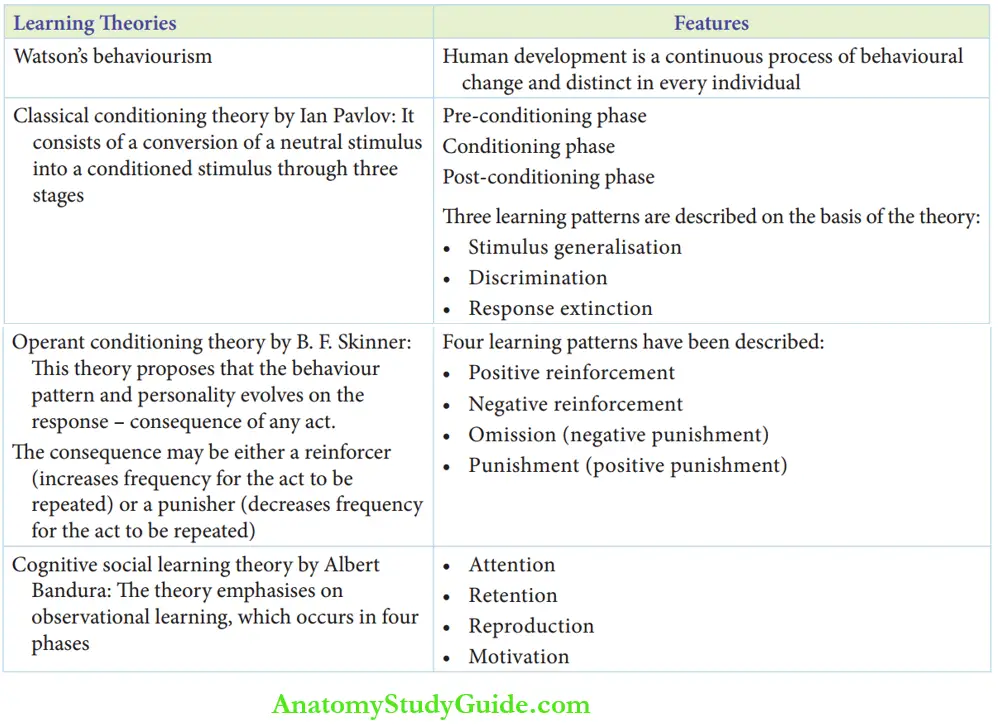
Theories that advocate the evolution of a child’s mental psyche by observation and learning from the environment constitute the ‘learning viewpoint’. Of various learning theories, a few important theories are discussed in this chapter. They are as follows:
- Radical behaviourism by Watson (1913)
- Classical conditioning theory by Ivan Pavlov (1972)
- Operant conditioning theory by Skinner (1938)
- Cognitive – Social learning theory bandura (1963)
Radical Behaviourism By Watson (1913)
John Watson viewed the infant as a blank slate and proposed the doctrine of tabula rasa. His view was that the infant’s personality or behaviour will depend on the environment. This includes the sociocultural environment and the way he is treated by his parents or other significant people.
The personal, interpersonal and sociocultural experiences of a child craft the behaviour pattern of the child in this blank slate. Watson believed too strongly on environmental influence as the key to evolve human (child) behaviour and hence named his theory ‘radical behaviourism’.
He did not believe in the following three features:
- Distinct stages
- Unobservable unconscious motives
- Cognitive processes
He advocated that human development is a continuous process of behavioural change strapped by the unique environment of the individual and would differ dramatically from person to person.
Theory Of Classical Conditioning By Ivan Pavlov (1972)
Classical conditioning theory was advocated by Ian Pavlov to explain the evolution of behaviour sequence on the basis of stimuli. As stimulus that has no associated response in an individual is called a neutral stimulus.
A stimulus that elicits a response in the individual is called a meaningful stimulus. Pavlov’s experiment combined a neutral stimulus with a meaningful stimulus that was repeatedly presented to the subject.
On repetitive presentation, the combination became so composite that the neutral stimulus when being presented alone elicits the same response as that of the meaningful stimulus. The neutral stimulus was then called the conditioned stimulus and its corresponding response was a conditioned response.
It happens in the following three phases, as depicted in Table.
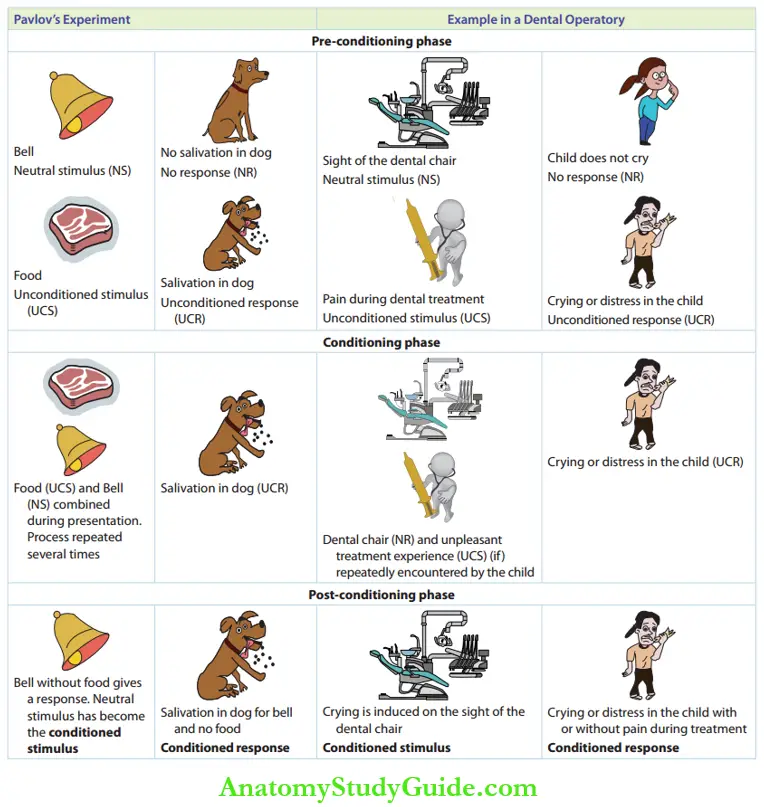
- Pre-conditioning phase
- Conditioning phase
- Post-conditioning phase
Pavlov described three different types of learning patterns in his experiment.
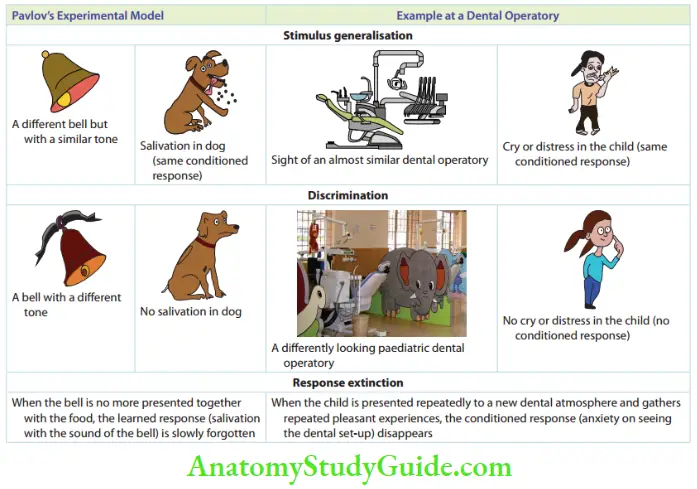
- Stimulus generalisation: When the conditioned stimulus is substituted by another, almost similar stimulus, it produces the same conditioned response.
- Discrimination: A distinctly different stimulus (not like the conditioned stimulus) in one or more dimensions will be identified and distinguished by the subject. It produces a distinctly different response.
- Response extinction: Gradual weaning and disappearance of a learned response because of lack of repeated occurrence of the conditioned stimulus.
Theory Of Operant Conditioning By Skinner (1953)
Operant conditioning is a form of learning that explains the evolution of behaviour patterns. The child actively interacts with the environment. He/she is free to perform any act or demonstrate any behaviour.
These freely performed acts or independently demonstrated behaviour are called operants. Every operant produces consequences. Depending on the consequence, the operant occurs again with either an increased or a decreased frequency.
In simpler terms, Skinner proposed that animals and humans will repeat actions that have favourable consequences and would not perform actions that have unfavourable consequences.
The consequence of an act (operant) that increases the probability of recurrence of the same act is called a reinforcer. The consequence of an act (operant) that either suppresses or decreases the probability of recurrence of the same act is called a punisher.
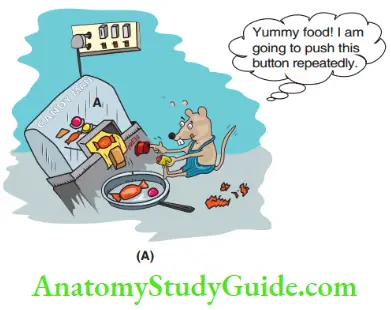
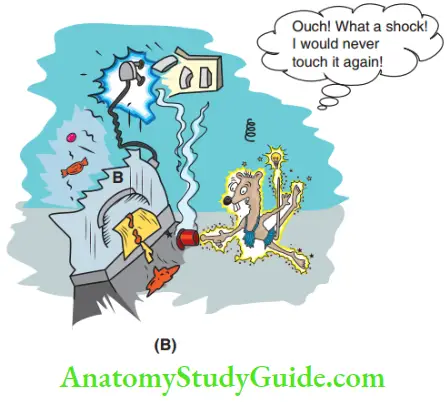
Skinner’s experimental model consisted of art which was freely allowed to push a bar of two mechanical gadgets, A and B. On pushing the bar of gadget A, the rat would receive a tasty food pellet. Pushing the bar of Gadget B led to an electric shock.
The rat was motivated to operate with gadget A but did not operate gadget B freely, although it was allowed to. This behaviour pattern was established for the rat. Tasty food pellet was a reinforcer and electric shock was a punisher.
This form of behaviour learning has four established patterns. They are as follows:
- Positive reinforcement
- Negative reinforcement
- Omission (negative punishment)
- Punishment (positive punishment)
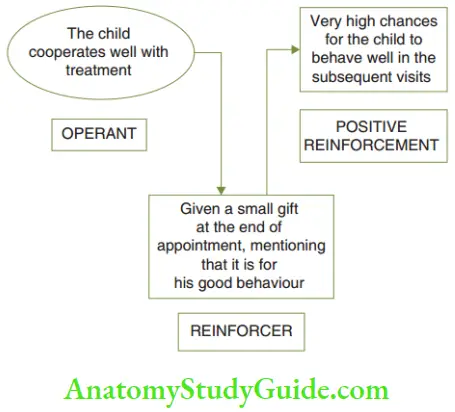
- Positive reinforcement is the learned pattern in which a particular behaviour is followed by presenting a reinforcer as its consequence increases the frequency of the occurrence of that behaviour.
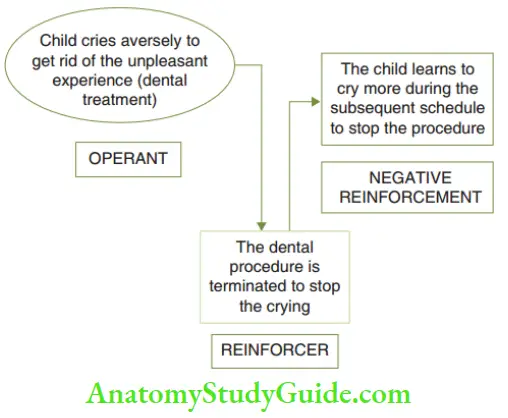
- Negative Reinforcement Negative reinforcement is the learned pattern in which a particular behaviour occurs with an increased frequency to avoid, escape or terminate an unpleasant operant.
- Omission (Negative Punishment) The omission is the learned pattern of behaviour in which a particular behaviour occurs with a decreased frequency following the removal of a pleasant reinforcer. Removal of the reinforcer or omission of the pleasant reinforcer is a form of punishment, and hence it is also called negative punishment. It is also called a time-out as the reinforcer is taken off from the situation and there is an ‘empty presentation’.
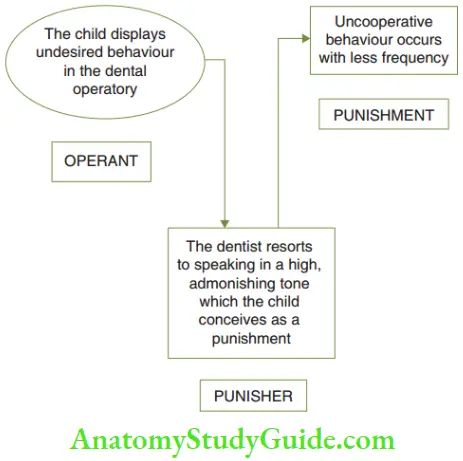
- Positive punishment is a learned pattern of behaviour in which particular behaviour occurs with a lesser frequency following a punisher as a consequence. The four learning patterns of the behaviour of operant conditioning theory can be applied at best for behaviour management in the dental operatory(as illustrated in the preceding text).
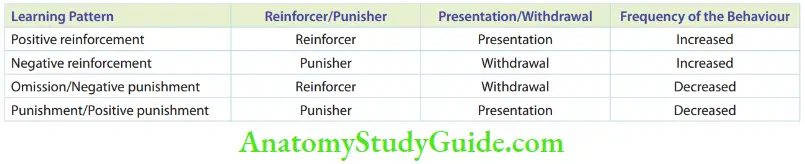
These patterns and their consequences are given in Table.
Cognitive Social Learning Theory By Bandura
Cognitive social learning theory, proposed by Albert Bandura, accepts the operant conditioning theory by Skinner. However, Bandura stressed that humans are cognitive beings who receive information and act upon it in a conscious and active way.
The activity over the information heard produces some worldly experience from which they learn more. The behaviour pattern is evolved as a result of this learning. Hence, Bandura called humans as active information processors.
He also proposed that in humans learning occurs not only on the basis of the behaviour–consequence relationship but also on the basis of one’s belief and understanding (thought or cognitive process).
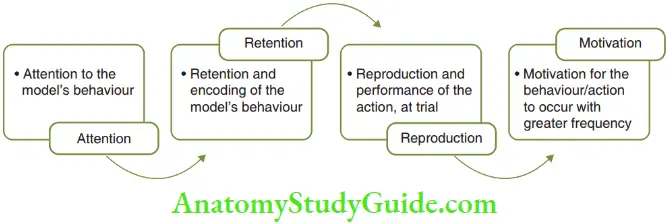
There is an emphasis on observational behaviour, that is, learning by observation of others’ behaviour. It is the central developmental process that cannot occur without a thought (cognitive) process.
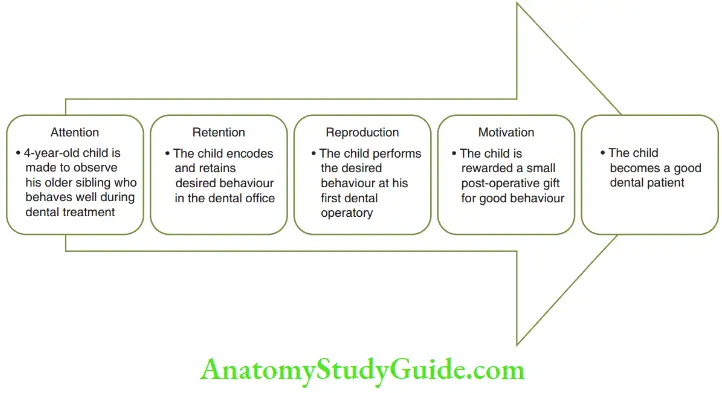
This observational learning occurs through four phases, namely attention, retention, reproduction and motivation. Figures depict the four phases and their application in the dental operatory.
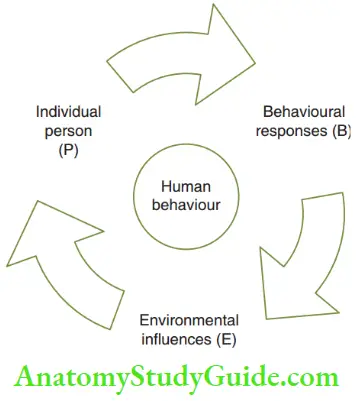
Bandura also proposed the concept of reciprocal determinism as an extension to cognitive social learning. Reciprocal determinism means that human behaviour evolves by an interaction between the person (earmarked as P), his behavioural responses (B) and environmental influences (E). These interactions are bidirectional.
Summary
- Learning theories advocate that behaviour and personality evolve as a learned pattern based on observation/ interaction with the social environment
- There are four major learning theories:
Leave a Reply